
Когда где-нибудь на планете случается страшное землетрясение, наводнение, обвал здания, сход лавин или селей, главным помощником команд спасателей всегда становится строительная спецтехника, ведь только ей по силам справиться с масштабными завалами, созданными стихией или техногенной катастрофой. Но, иногда управлять такой техникой в условиях тяжелых разрушений или химической загрязненности человеку опасно, и чтобы решить эту проблему, команда инженеров-исследователей из четырех самых крупных японских университетов совместно с компанией Komatsu разработала концепцию полноповоротного «двурукового» строительного робота, предназначенного для ликвидации последствий чрезвычайных ситуаций.

В рамках программы Tough Robotics Challenge ученые построили автономную спецтехнику, оснащенную двумя гидравлическими «руками»-манипуляторами, на которые в зависимости от выполняемых задач, можно закреплять, как традиционное навесное оборудование, так и сварочные и манипуляторные механизмы.
В частности, этот робот способен копать траншеи и поднимать грузы, доставлять на место трубы, оттаскивать бетонные блоки и камни, с помощью гидромолота проводить демонтаж аварийных конструкций, а используя различные грейферы расчищать территорию.
При этом, обе стрелы экскаватора, закрепленные на полноповоротном механизме, имеют невероятную маневренность, и могут совершать движения вокруг нескольких осей, то есть, имеют подвижность большую, чем плечевой сустав человека. Кроме того, они способны играть роль аутригеров и балансиров, которые наделяют гусеничную машину высокой степенью устойчивости. Когда технике нужно преодолеть препятствия, взобраться на склон или перелезть через завалы, она использует свои рабочие органы, как человек – руки, то есть, удерживает собственный вес на месте, или наоборот подтягивает машину вперед/вверх, позволяя ей выдерживать высокие нагрузки и выполнять такие операции, на которые не способна иная спецтехника.
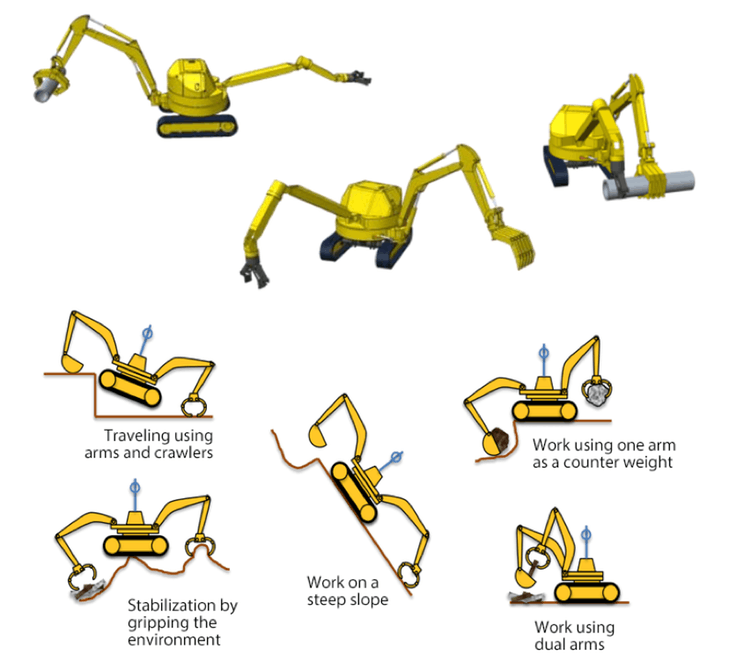
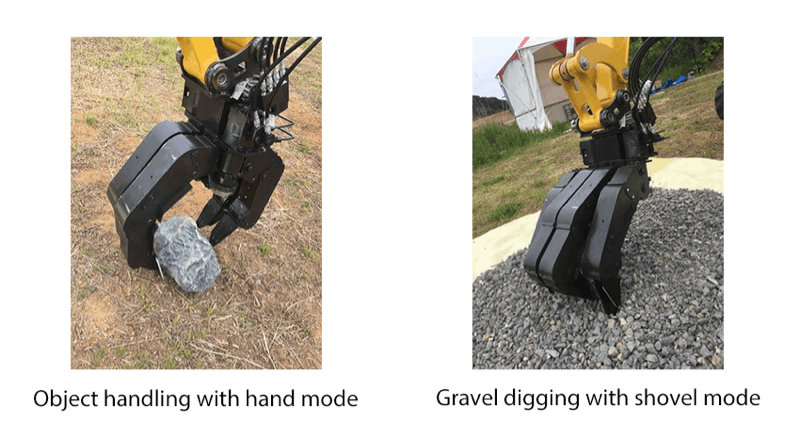
К тому же, специально для данного робота-экскаватора ученые разработали особый 4-пальцевый захватный механизм с разным уровнем сжатия, имитирующий работу кисти человеческой руки. Данное устройство позволяет роботу проводить особо тонкие и чувствительные операции, к примеру, аккуратный захват небольших предметов.
Управляется эта техника дистанционно, а, оператор, руководящий ее движениями, благодаря особому программному обеспечению, может на расстоянии получать обратную связь о силе сжатия и прилагаемых усилиях, таким образом, контролируя работу механизма, и по ходу дела меняя образ необходимых действий.
Также у данного робота есть свой «слуга» - вспомогательный многороторный беспилотный летательный аппарат, связанный с техникой. Он может проводить разведку с воздуха, передавая потоковое изображение оператору, тем самым обеспечивая лучшее понимание ситуации в зоне бедствия.
Исследователи, создавшие эту технику, считают, что она станет отличным помощником спасателей в деле ликвидации крупномасштабных катастроф и аварий. По их задумке, уже в ближайший год можно начать серийное производство данных машин, дабы снабдить ими все мировые организации, участвующие в устранения последствий стихийных бедствий и техногенных аварий.


