Исследовательская группа Mediated Matter Group из Массачусетского технологического института (МТИ) разработала новую технологию 3D-печати, основанную на использовании автономных роботов, получивших название Fiberbots.
Если смешать безотходную эффективность аддитивного производства и команду небольших автономных роботов, то можно получить некоторое представление о том, чего пытается достичь группа из МТИ. Последний проект, выполненный командой Mediated Matter Group, которая основана и возглавляется дизайнером Нери Оксманом, объединяет 16 отдельно стоящих, армированных волокном композитных (FRC) труб, построенных в тандеме армией небольших роботов.
Получившаяся в результате инсталляция высотой 4,5 метра напоминает о других аддитивных технологиях, которые уже разработаны человечеством, таких как 3D-печатные дома NASA и ройной робототехнике, которая решает такие строительные задачи, как кладка.

Разработанная Mediated Matter Group технология отличается от подобных проектов двумя главными аспектами. Во-первых, команда применила быстрые методы изготовления к не прямолинейным объектам. Во-вторых, они преодолели общие ограничения 3D-печати, такие как неструктурный носитель и наличие станины, существенно ограничивающие размер изготавливаемого объекта. За счет использования стекловолокна и разработки автономного строительного робота, а точнее 22 небольших машин, которые собственно и являются рабочими органами при 3D-печати, удалось создать объекты, существенно превышающие размеры роботизированных помощников.

В течение 12 часов каждый из 16 роботов продвигался по своей уникальной криволинейной траектории вверх, начиная с многоразовых опор, состоящих из стальных труб. Протянутые трубы FRC имеют общую кривизну в пределах от 2,5 метров до 4,1 метра и выступы в горизонтальном направлении до 1,5 метра. Роботы, каждому из которых была задана заранее спланированная траектория, питался от электрической сети ближайшего здания.

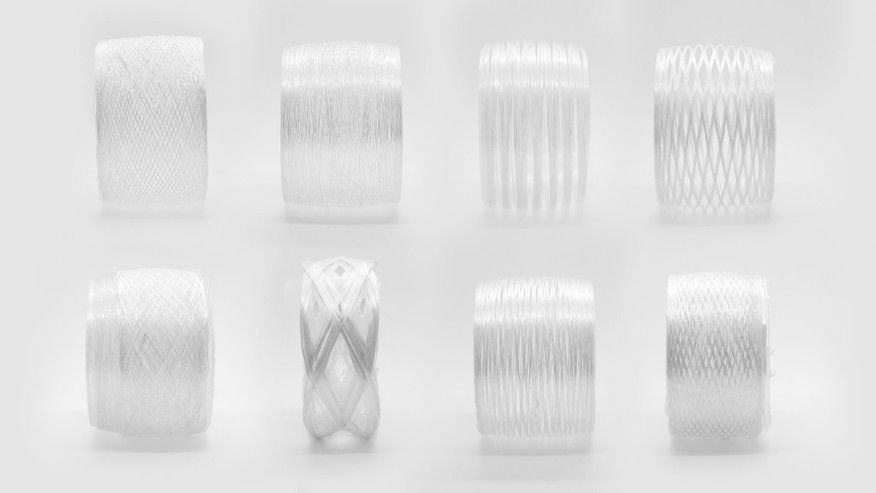
Наряду с центральным корпусом, содержащим электронику, источник УФ-излучения и двигатель, каждый Fiberbot имел надувную силиконовую мембрану, служащую цилиндрической оправкой, а также интегрированный вращающийся рычаг для намотки нитки из стекловолокна, смоченную смолой твердеющей под действием ультрафиолета и извлекаемую из специальной системы хранения. Начиная от основания, каждый бот двигался вверх, наматывая нить. Когда Fiberbot завершал отрезок длиной 90 мм, оправка сдулась, отсоединив робота от трубчатой оболочки, и он перемещался вверх, чтобы начинать обматывать следующий отрезок. Каждая трубка имела диаметр 100 мм.

В целом, по оценкам группы, для каждой полупрозрачной трубки требовалось приблизительно 2 км стекловолоконной нити, что в общей сложности составляет 130 км обернутого волокна для всей инсталляции. Конечные длины трубок были в десятки раз длиннее, чем сами миниатюрные роботы.
Как заявляют разработчики, Fiberbots является отправной точкой для умного строительного роя. До того, как роботы были выпущены на рабочую площадку, исследователи назначили каждому заранее определенный путь, используя алгоритм, основанный на распределенной поведенческой или флоковой компьютерной модели ученого Крейга Рейнольдса, которая гарантировала, что механизмы будут избегать столкновений со своими коллегами или внешними объектами.

Также в Mediated Matter Group заявили, что на Fiberbots можно устанавливать внешние датчики, лазеры или камеры.
«Fiberbots могут реагировать в реальном времени на внешние раздражители и сигналы, такие как препятствия или изменение внешней среды». Если погода или ветер изменяются, например, в середине конструкции роботы могли «наматывать более толстые и прочные композитные волокна», изменяя схему их намотки и направляя свои трубчатые пути ближе друг к другу, создавая более плотную структурную решетку», - сообщение Mediated Matter Group в журнале Science Robotics.