Мы уже рассказывали вам, что самый жестокий за все годы кризис в горнодобывающей промышленности подстегивает ученых и инженеров переносить добычу полезных ископаемых с суши под воду.
А это означает, что человечеству нужно создавать подводные машины, способные справляться с данным процессом. При этом, невзирая на впечатляющие открытия в области создания подводной робототехники, такие машины долгое время оставались довольно грубыми и не способными решать ювелирные задачи.
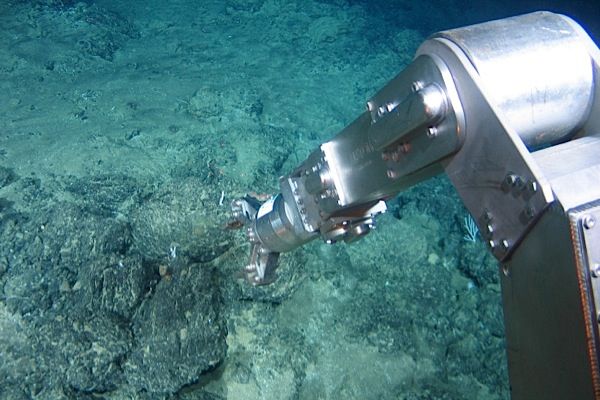
Манипуляторы роботов, не приспособленные ощущать силу своего давления и сжатия, захватывая провода, тонкие строительные конструкции или образцы подводной жизни и минералов, часто их повреждали, приводя в полную негодность. Можно сказать, что такие «прикосновения» роботов были слишком грубыми, а значит, уменьшали, а иногда и сводили на нет все усилия, затраченные на них. К примеру, неуклюжий робот, созданный гарвардским ученым Роберт Дж. Вудом, был изобретен специально для сбора таких хрупких существ, как кораллы. Анализируя состав кораллов, геологи были в состоянии находить под водой залежи нефти и газа. Однако, робот, поднимая на поверхность эти нежные субстанции, в 90% случаев давил их в своих «руках», оставляя ученых без образцов.
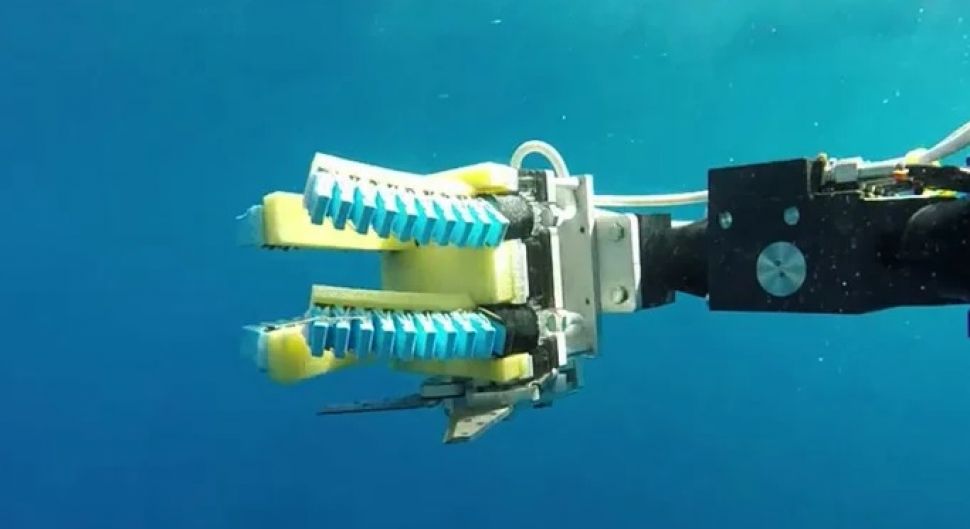
Именно поэтому группа ученых из Гарвардской школы инженерных и прикладных наук, во главе с Вудом, задалась целью создать манипуляторы с «нежными руками», способные имитировать человеческое прикосновение, которое позволило бы без ущерба захватывать самые хрупкие предметы.
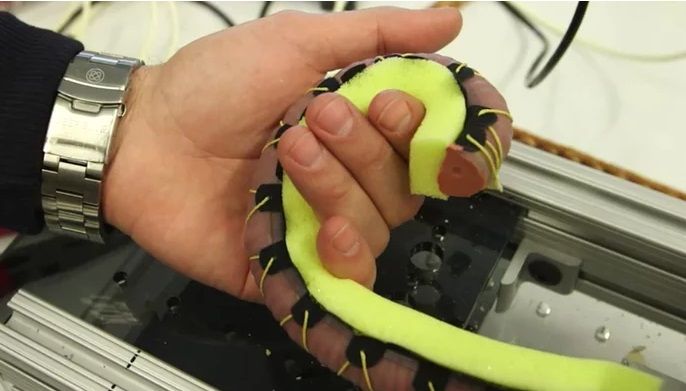
При этом команда ученых решила использовать в своей работе только очень простые технологии и недорогие материалы, чтобы данное решение легко воплощалось в жизнь.
Для того, чтобы убедиться, что изобретенные ими захваты могут манипулировать объектами разных размеров и форм, команда провела серьезные испытания, используя свое творение в заливе Эйлат в северной части Красного моря, в мае 2015 года.
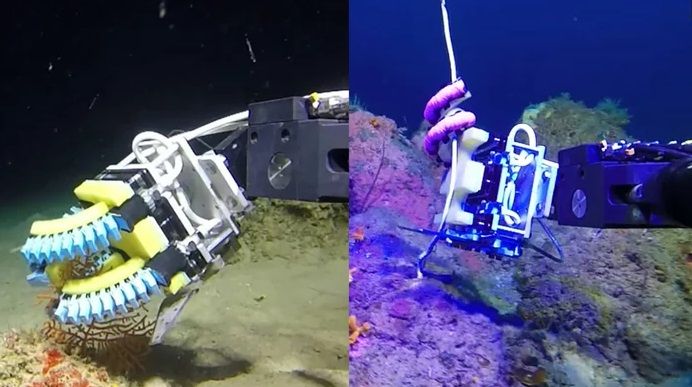
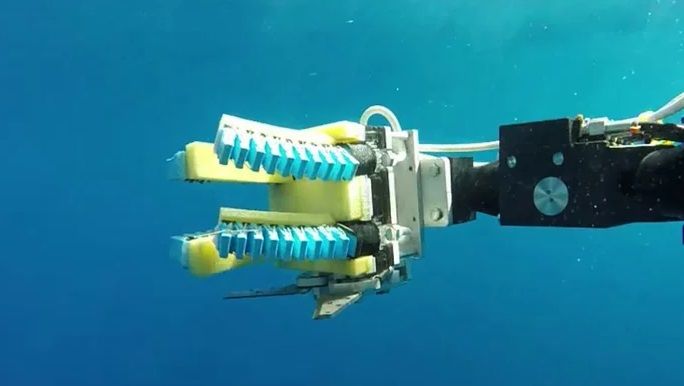
При этом робота погружали на глубину до 170 м, где он захватывал очень нежные предметы подводной флоры и фауны.
Тестирование робота прошло успешно, и теперь команда трудится над внедрением двух технологий: передачи обратной тактильной связи от руки манипулятора к ее оператору, и возможности работы робота на глубинах до 6000 метров.


