Немногие из нас видели, но большинство слышали, что живет в морях такое удивительное существо, как морской еж.
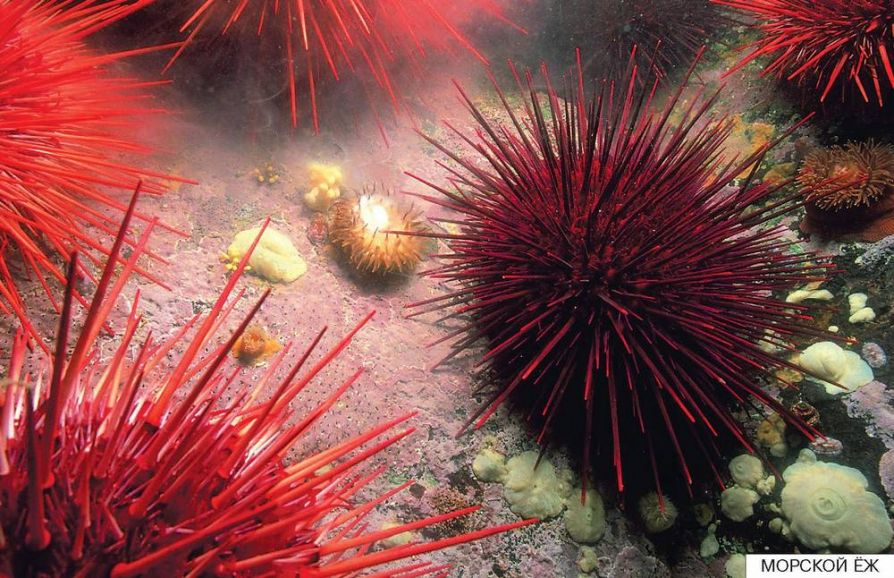
Это колючее сферическое беспозвоночное имеет невероятно «удобный» рот, с настолько мощными «челюстями», что небольшая стая этих морских существ способна довольно быстро перемолоть внушительную «плантацию» коралловых рифов. Именно такая способность ежей вдохновила команду инженеров и морских биологов из Университета Калифорнии в Сан-Диего, создать так называемый грейферный захват совершенно нового образца.
Расположенный в нижней части его сферического тела, рот ежа (также называемый "фонарем Аристотеля") состоит из пяти изогнутых зубов, которые образуют форму куполовидной звезды. Такая конструкция рта позволяет морскому ежу поднимать со дна очень мелкие предметы, а также отгрызать, выкусывать и жевать даже весьма твердые породы кораллов.

Рот морского ежа
И команда ученых, полностью воссоздав в роботизированной руке форму рта морского существа, сконструировала захват, который также, без вреда для поднимаемого предмета, может справиться со множеством тонких задач. К примеру, сейчас предполагается, что таким манипулятором можно было бы оснащать космических роботов, собирающих образцы почвы на далеких звездах и планетах.
Исследование инженеров было сосредоточено на определенной разновидности морских ежей – розовых, обитающих у западного побережья Северной Америки. Изучив строение их рта, ученые воссоздали 3D-модель, а затем и построили точную цифровую копию, установив, что главной особенностью зубов морского ежа является специальный гребешок на каждом из «клыков».

Этот гребешок, проходящий посередине зуба, механически ослабляет силу давления на него породы весом в 4,5 кг примерно на 16%, то есть защищает зуб от слома и увеличивает возможную грузоподъемность.
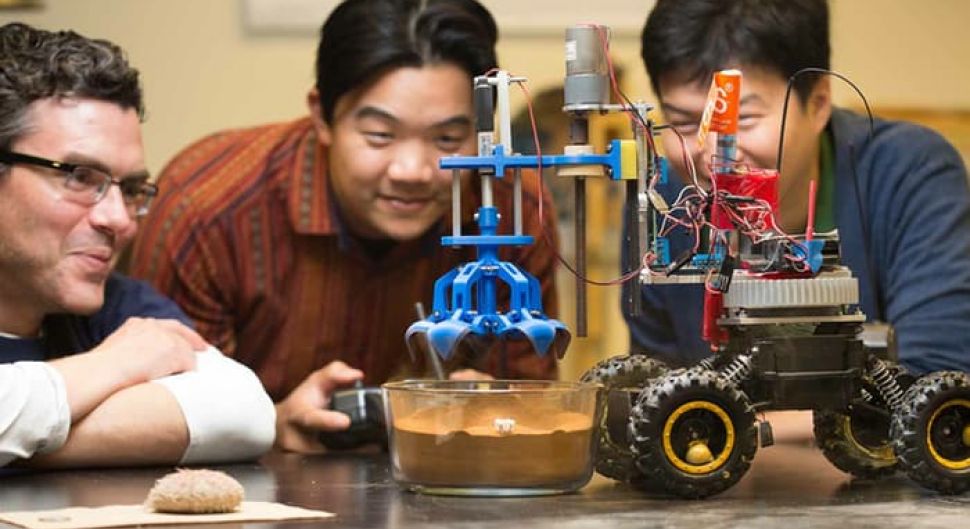
После нескольких небольших модификаций, ученые установили воссозданный грейферный захват на маленький, управляемый дистанционно колесный экскаватор, которому было отдано распоряжение поднимать различные предметы с пляжного песка и каменистого грунта.

После успешных «наземных» испытаний, ученые смоделировали для машинки марсианские условия, в которых она также хорошо себя зарекомендовала. Так что, вероятно, очень скоро, новый манипулятор-захват будет введен в эксплуатацию, как на роботах, отправляемых на иные планеты, так и на знакомой нам спецтехнике, работающей в земных условиях.


