Команда Гарвардской школы инженерных и прикладных наук разработала мягкого змееробота, для создания которого использовалась технология киригами – древнего японского искусства вырезки бумаги.
Мастера киригами создают трехмерные фигуры, разрезая лист бумаги в нужных местах и складывая из него нужную структуру. Этот подход использовали и инженеры Гарварда.
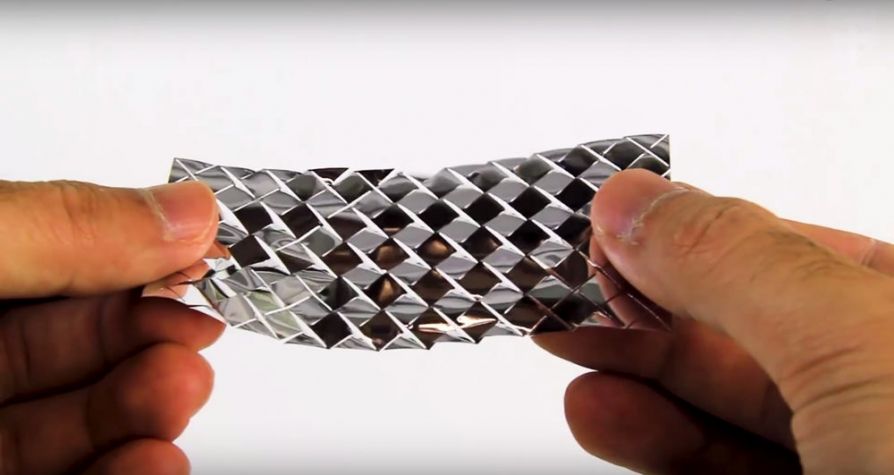
В состоянии покоя робот имеет вид цилиндра с сетью небольших разрезов на "коже". Во время движения эта перфорация превращается в трехмерную структуру из чешуек. Передвигаясь робот имитирует движения ползущей змеи – цепляется чешуйками за поверхность, подтягивая свое тело вперед.
По словам разработчиков, они экспериментировали с различными формами перфорации, чтобы найти наилучший вариант. В конечном итоге команда остановилась на трапециевидных чешуйках, которые дают больше сцепления.
Роль двигателя при этом выполняет эластомерный привод, в который подается воздух. Уникальность змееробота заключается как раз в том, что для его перемещения нужен только один двигатель, в отличие от стандартных роботов, которым требуется несколько.
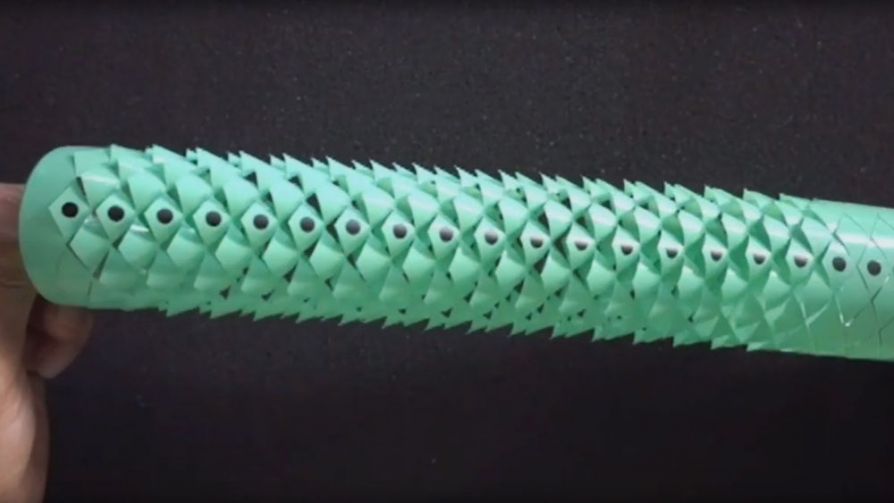
Чтобы сделать робот полностью автономным, в хвостовой его части установлен источник питания, элементы управления, приводы и датчики.
Это уже вторая версия этого змееробота. У предыдущей версии все разрезы были одинакового размера и формы из-за чего все чешуйки раскрывались одновременно.
Новая система более гибкая. Благодаря компьютерному моделированию и экспериментам инженеры научились управлять раскрытием чешуек и маневренностью робота.
Планируется, что робот будет использоваться для исследования сложных и опасных территорий, а также во время разведывательных и поисковых операций. Если же ученым удастся создать миниатюрную версию, то змееробот можно будет использовать даже для сложных инвазивных медицинских операций.