Как известно, у обычных дронов и беспилотных летательных аппаратов, будь у них 4, 6 или даже 18 роторов, все двигатели располагаются в одной горизонтальной плоскости. Но, несмотря на то, что все они довольно проворно передвигаются, такое расположение роторов не дает им хорошей устойчивости и не позволяет резко менять угол направления движения.
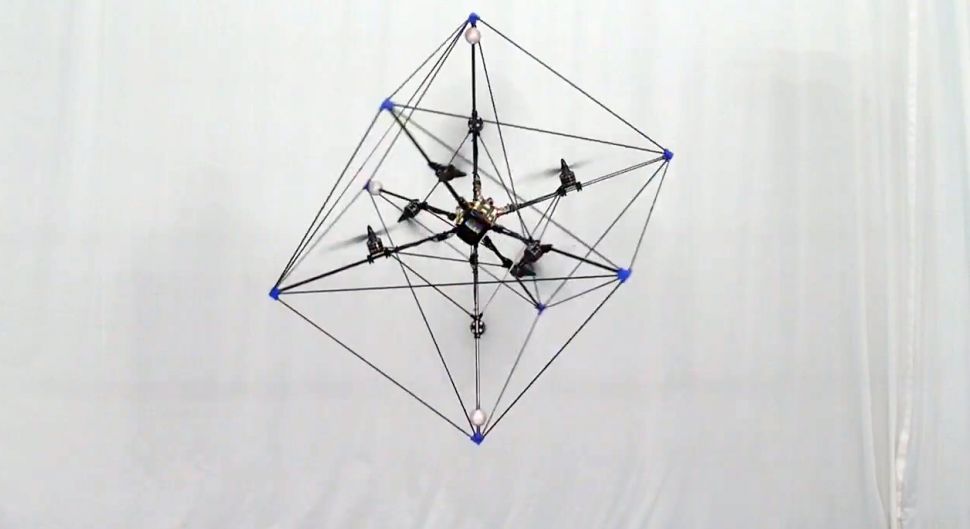
Но, кажется, новая конструкция дрона, которую назвали «Fetching Omnicopter», в которой роторы находятся в разных плоскостях, решает эти проблемы, позволяя двигателям управлять тягой в разных направлениях.

Швейцарские инженеры Дарио Бресцианини и Рафаэло Дандреа из Цюрихского Института динамических систем и управления, которые являются разработчиками новой концепции омникоптера, говорят, что дроны уже давно показали себя, как очень полезные устройства, способные помогать человеку в разведке, позиционировании, спасательных операциях, и мн. др. Но, они пока довольно «прямолинейны» в своих траекториях полета, и плохо умеют взаимодействовать с окружающей средой. К примеру, сейчас им невозможно поручить манипулировать предметами и проводить монтаж каких-нибудь строительных конструкций. Fetching Omnicopter же способен самостоятельно контролировать свою позицию, мгновенно меняя направление движения, то есть, умеет маневрировать в сложных средах.
Происходит это не только благодаря уникальному расположению роторов, но и использованию в октокоптере особого алгоритма расчета траектории движения. Это программное обеспечение позволяет дрону новой конструкции генерировать порядка 500000 траекторий в секунду, которые направляют беспилотный аппарат в желаемое конечное положение в заданные сроки.
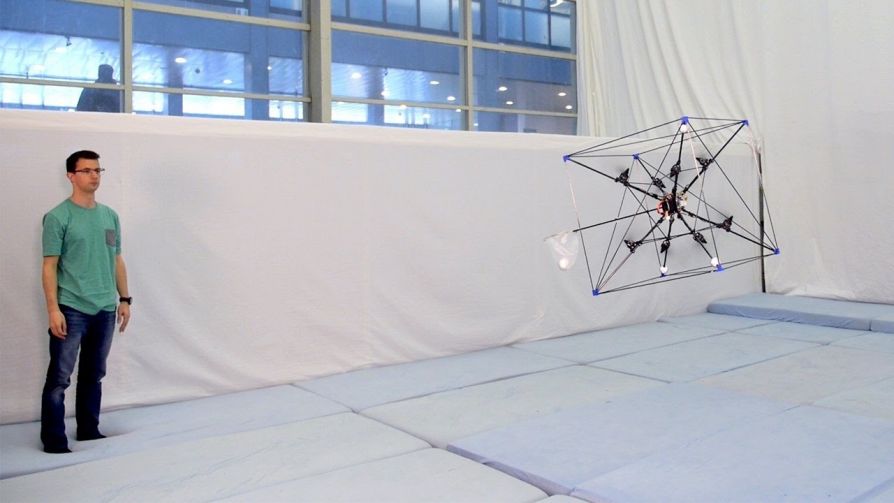
И впечатляющие результаты этих способностей можно увидеть на видео ниже, в котором дрон с легкостью ловит брошенный, постоянно в разном направлении, маленький мячик. Устройство очень быстро, буквально за миллисекунды, прогнозирует траекторию полета мяча, и когда требуется его поймать, оказывается в нужном месте.


