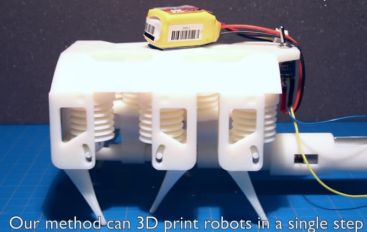
Промышленные роботы-манипуляторы – это действительно невероятные машины, не только потому, что они мощные, быстрые и точные. Но и потому, что они могут адаптироваться к меняющейся обстановке. Когда вы меняете инструмент, которым он управляет, вы полностью меняете концепцию машины – поставьте пульверизатор и он станет роботом-маляром; поставьте захват и он станет роботом, упаковщиком; а если поставить сварочный аппарат, то он станет сварщиком.
Эта гибкость позволила роботам стать одним из ключевых элементов промышленной инфраструктуры за последние 50 лет. С другой стороны, несмотря на универсальность, роботы достаточно тупые машины – они никак не реагируют на окружающую их обстановку, которая не предусмотрена в их программе, поэтому они не используются нигде, кроме фабрик и конвейерных линий сборки. Однако, если научить их взаимодействовать с окружающей обстановкой, то они могут стать отличными помощниками в повседневной жизни.
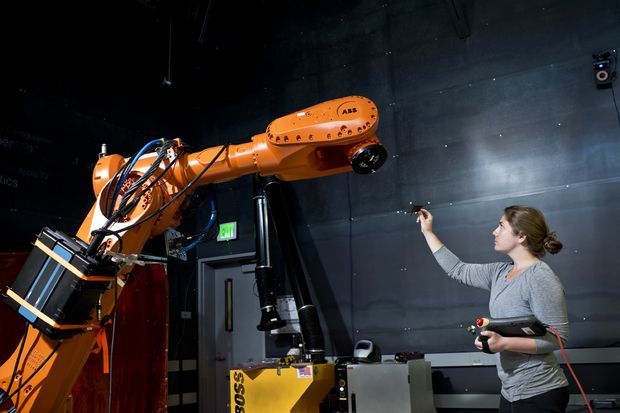
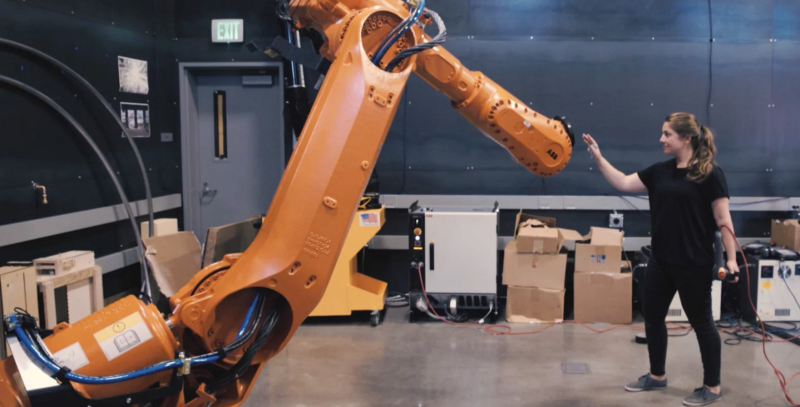
Одним из путей адаптации промышленных роботов к окружающему миру может стать предложенный инженером Мадлен Гэннон способ управления при помощи жестов. Она разработала программу Quipt, которая позволяет обучать роботов распознаванию движений человеческих рук и, таким образом, обучаться. Достигается это при помощи специальных маркеров, одетых на руки «укротителя роботов» и системы распознавания, которую монтируют на машину. Более подробно с работой системы можно ознакомиться в этом видео: